computers and a variety of input/output devices
including multiple control, status, and synchro signal
interfaces. The KCMX allows the controlling
computer to receive data and status information from
external subsystems (missile, gun, electronic warfare
[EW], antisubmarine warfare [ASW], and so forth) and
to transmit data and control information to external
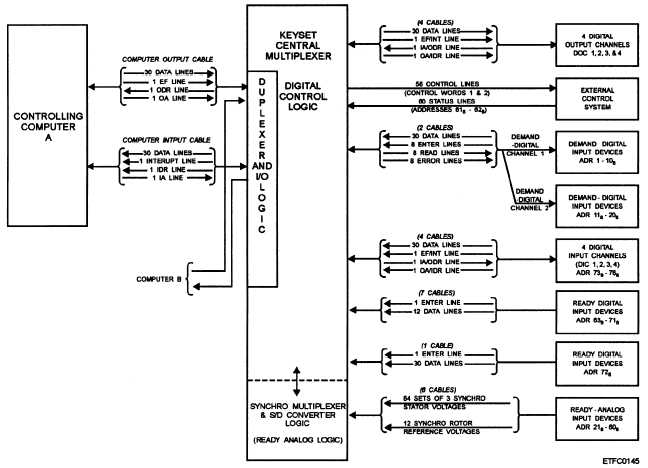
subsystems. A simplified block diagram of the KCMX
is shown in figure 13-11.
Duplexer and Input/Output (I/O) Logic
The duplexer (figure 13-11) allows the KCMX to
be controlled by two computers on a one at a time basis.
The duplexer is controlled by external function
commands from the computers. Three external
function commands are used to control the duplexer
logic: request control, release local, and release remote.
REQUEST CONTROL. —The request control
(RC) command permits the requesting computer to gain
control of the KCMX if the other computer is not in
control.
RELEASE LOCAL. —The release local com-
mand relinquishes control of the KCMX.
RELEASE REMOTE. —The release remote
command is a high-priority code that allows one
computer to take control of the KCMX from the other
computer.
I/O LOGIC. —The KCMX communicates with the
digital computers over standard CDS slow I/O
channels.
Digital Control Logic
The digital control logic (figure 13-11) puts the
KCMX in one of its seven operating modes as specified
by the controlling computer. The KCMX operating
modes are neutral, duplex, transmit data from unit
computer (TDUC), receive data from unit computer
(RDUC), TDUC and RDUC, interrupt, and keyset error.
NEUTRAL MODE. —Neutral mode is the at-rest
mode when neither of the controlling computers is
requesting control of, or is in control of, the KCMX.
Figure 13-11.—KCMX block diagram
13-16